V WORKIF - WORKSHOP DE ENSINO, PESQUISA, EXTENSÃO E INOVAÇÃO
ISBN: 978-85-68861-01-1
OTIMIZAÇÃO DA CAPTAÇÃO DE ENERGIA FOTOVOLTAICA COM USO DE ALGORITMO GENÉTICO NO RASTREAMENTO SOLAR
SILVA SOARES, MURILLO HENRIQUE;OLIVEIRA, RUY;OLIVEIRA, MARIO ANDERSON;NASCIMENTO, VALTEMIR EMERENCIO
Engenharias - Eixo Temático 02 - Inovação Tecnológica e Transferência de Tecnologia
Palavras-chave: Energia Fotovoltaica;Algoritmos Genéticos;Rastreamento Solar
Introdução
Atualmente, a demanda por energia elétrica em todo mundo tem se mostrado crescente e acelerada. Este crescimento é provocado pela alta elevação populacional e pela dependência de tecnologias que utilizam energia elétrica. Portanto, cada vez mais aumenta a necessidade por energia elétrica que geralmente provém de fontes não renováveis ou hídricas com alagamento de grandes áreas. Este modelo ocasiona a poluição do ambiente e o aquecimento global.
Para atenuar este problema, a obtenção de energia elétrica através de fontes renováveis mostra-se uma alternativa menos agressiva ao meio ambiente. Dentre estas fontes, destaca-se a energia solar fotovoltaica, onde a energia extraída por um painel fotovoltaico depende da incidência de radiação solar direta em uma determinada área da placa fotovoltaica. A potência máxima será extraída quando o painel estiver posicionado perpendicularmente aos raios solares, maximizando a área de incidência. Nos sistemas fotovoltaicos utilizados em residências o painel é instalado em uma estrutura fixa no telhado com uma inclinação igual ao da latitude do local de instalação. Por serem fixos, a radiação solar direta será perfeitamente perpendicular ao painel somente durante um curto intervalo de tempo ao longo do dia, em alguns dias do ano.
De maneira a aumentar o tempo de extração da energia solar, o painel fotovoltaico deve ser capaz de acompanhar a trajetória solar, a partir de atuadores, sensores e um algoritmo robusto para o controle em tempo real, implementados em um computador de baixo custo. Portanto, este trabalho tem o objetivo de maximizar a incidência de raios solares perpendicularmente ao painel fotovoltaico durante o maior intervalo de tempo possível, de forma a movimentar as placas fotovoltaicas, fazendo-as acompanhar o trajeto do sol. O controle da posição do painel é feito com base na comparação entre a posição do sol calculado por algoritmos genéticos e a posição do painel fotovoltaico, determinado por sensores.
Algoritmos Genéticos (AG’s), utilizados para estimar as coordenadas do sol neste projeto, são métodos para encontrar soluções de baseadas nos mecanismos de evolução de populações de seres vivos, seguindo o princípio da seleção natural e sobrevivência do mais apto, declarado em 1859 pelo naturalista e fisiologista inglês Charles Darwin em seu livro A Origem das Espécies.
Em comparação com os sistemas naturais, os AG’s descrevem o problema (ambiente de sobrevivência) sob forma de uma função matemática, em que as "estruturas" (indivíduos) mais fortes obterão valores mais altos de função. Assim cada indivíduo corresponde a uma possível solução. Então, trabalhando com um grupo de indivíduos simultaneamente, verifica-se a potencialidade de cada um em relação ao grupo, tentando selecionar os mais aptos para o cruzamento. Depois de se efetuar o cruzamento, cada gene de cada indivíduo estará sujeito a uma eventual ação da mutação. Logo, os AGs baseiam-se nos processos naturais de seleção, cruzamento e mutação. Esses processos são conhecidos como operadores genéticos (LUÍZ SOARES, 1997).
Desenvolvimento
É montado o protótipo de acordo com a Figura 1. Os sensores Magnetômetro em conjunto com Acelerômetro, instalados atrás do painel, provem as informações de localização para o acionamento dos motores de passo, determinando o posicionamento angular da placa fotovoltaica. A partir de um relógio de tempo real (RTC ‑ Real Time Clock) e dados da localização, os algoritmos genéticos implementados no Raspberry-Pi estimam a posição solar. Desta forma deve-se obter o sincronismo do angulo de inclinação entre a posição angular do painel e a posição solar.
Figura 1 ‑ Protótipo De Rastreador Solar De Baixo Custo Utilizando Algoritmos Genéticos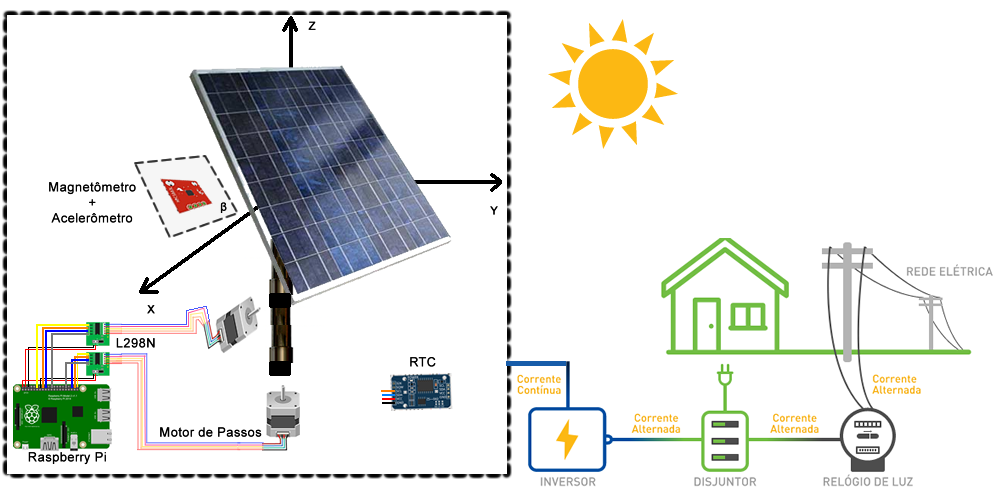
Fonte: Próprio autor, 2018.
-
- Inclinação da Placa Fotovoltaica
O sensor GY-80 10 DOF possui a função de acelerômetro e magnetômetro. Ambas as grandezas são medidas através de vetores tridimensionais. Pode-se definir o vetor aceleração![]() e o vetor campo magnético
e o vetor campo magnético ![]() como:
como:
![]() = ax, ay, az e
= ax, ay, az e ![]() = mx,my,mz .
= mx,my,mz .
Em condições normais de funcionamento, o vetor
Onde E é um vetor perpendicular a
Os ângulos formados entre a projeção do eixo x no plano composto pelos vetores
Ψ = ![]() (1)
(1)
Onde xu e xe são coordenadas da projeção do eixo x nos vetores
![]() (2)
(2)
Sendo yu e yN as coordenadas da projeção do eixo y nos vetores
Figura 2 ‑ (a)Definição de Ψ no plano E x U e (b) β no plano N x U
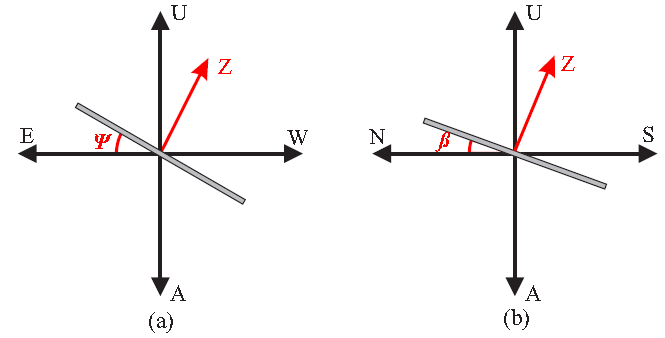
Fonte: BATISTA DE ARAÚJO, 2015.
-
- Calculo da posição solar
A posição do sol pode ser determinada a partir de dois ângulos notáveis utilizados na padronização definida pela Associação Brasileira de Normas Técnicas (ABNT) em sua norma NBR10899/2006: Energia Solar Fotovoltaica - Terminologia. O ângulo horário solar (ω) é o angulo diedro com aresta no eixo de rotação da Terra, formado pelo semiplano que contém o sol e o semiplano que contém o meridiano local, com faixa de variação -180º < ω < +180º e, por convenção, positivo no período da tarde. A declinação solar (δ) é o angulo de vértice no centro da Terra, formado pelas semirretas definidas pela direção do sol e pelo plano do Equador, com faixa de variação -23,45º ≤ δ ≤ +23,45º e, por convenção, positivo quando o Sol estiver incidindo perpendicularmente no hemisfério Norte (ABNT, 2006). A figura 3 ilustra os ângulos ω e δ em relação à Terra e a um observador genérico.
Figura 3 ‑ Definição do ângulo horário solar ω e da declinação solar δ em relação a um observador.
.png)
Fonte: BATISTA DE ARAÚJO, 2017.
Em seu trabalho, Oliveira (2007) utilizou equações matemáticas para a determinação do angulo horário solar (ω). Essas equações possibilitam uma boa aproximação para o valor de ω que está relacionado com a hora solar obtida em um relógio de sol. Devido a irregularidade da orbita terrestre em torno do sol, que descreve uma trajetória elíptica e pela inclinação do eixo de rotação da terra, a hora determinada por um relógio solar difere em alguns minutos do horário local. A diferença em minutos (E) entre a hora solar e a hora local é definida como sendo (OLIVEIRA, 2007):
E = 9,87sin (2B) - 7,53cos (B) - 1,5sin (B) (3)
Onde B é dado em radianos e é: ![]() , 1 ≤ N ≤ 365 (4)
, 1 ≤ N ≤ 365 (4)
B representa um angulo que corresponde ao ponto no qual a terra se encontra na orbita solar. N representa o dia juliano, que é o número correspondente ao dia do ano entre 1 e 365. Em consequência das equações 3 e 4, a hora solar (Hs) pode ser calculada como:
![]() (5)
(5)
Sendo Lp a longitude do meridiano da hora oficial e Ll a longitude do meridiano local, que possui valor negativo caso esteja situado a Oeste do meridiano da hora oficial. A hora solar e o angulo horário solar ω expresso em graus estão relacionados pela seguinte equação:
![]() (6)
(6)
A declinação solar δ é calculada levando em consideração apenas o dia juliano (N). É definida como sendo (ALATA; AL-NIMR; QAROUSH, 2005):
![]()
-
- Aplicação com AGs
Utilizando a linguagem de programação python, iniciou-se a etapa do desenvolvimento do algoritmo genético. Nesta etapa de desenvolvimento, a estrutura básica é definida como:
• População inicial: é gerada com tendenciosidade para regiões promissoras do espaço de busca e se aplica estratégia seeding (inserção de uma solução obtida por outro método, através do modulo pysolar);
• Avaliação de Aptidão: determinado a partir de minimizações para elevação solar e azimute, respectivamente;
• Seleção: Os indivíduos são selecionados para torneios de probabilidade igual, o indivíduo com menor aptidão (minimização do problema) é escolhido;
• Cruzamento: A taxa de crossover é definida como 0.75. É optado pelo método de cruzamento Blend Crossover (BLX-α) proposto por (Eshelman e Shaffer, 1993), devido os cromossomos (indivíduos) possuírem representações reais;
• Mutação: É substituído um gene por um número aleatório de uma distribuição gaussiana. A taxa de mutação é definida como 0.1;
• Critério de Parada: O algoritmo é finalizado após um número determinado de gerações, retornando o melhor indivíduo, caso requisito satisfeito, ou para reavaliação, caso contrário.
d. Resultados e Discussões
Os testes realizados com o protótipo foram bem-sucedidos. Os sensores, magnetômetro, acelerômetro e giroscópio forneceram os dados para o posicionamento da placa fotovoltaica, como mostrado na figura 4, para a sincronização com o posicionamento solar.
Figura 4: Dados dos sensores, magnetômetro, acelerômetro e giroscópio.
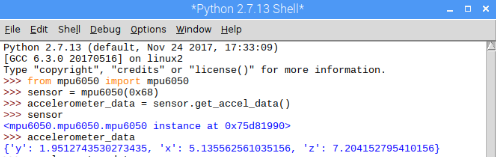
Fonte: Elaborado pelo autor, 2018.
Desta maneira os dados analisados a partir do sensor magnetômetro é utilizado para a determinação do norte e sul geográfico, sabemos que o norte magnético é o sul geográfico e o sul magnético é norte geográfico da terra. A partir do acelerômetro é determinado o vetor gravidade (contrário ao vetor normal) e o giroscópio é utilizado para observar o posicionamento da placa fotovoltaica, figura 5.
Figura 5: Dados do acelerômetro e giroscópio
Fonte: Elaborado pelo autor, 2018.
A determinação do leste e oeste, se baseia na multiplicação vetorial entre os dados coletados dos sensores magnetômetro e acelerômetro, concluindo a estimação dos pontos cardeais principais.
Porém houve uma dificuldade na comunicação simultânea I2C entre os sensores e o computador de baixo custo, Raspberry Pi.
A estrutura básica de algoritmo genético é especializada para codificação real, utilizando estratégia seeding, seleção por torneio, cruzamento Blend Crossover e mutação por distribuição gaussiana. O algoritmo segue em pleno funcionamento, determinando os ângulos horário solar (ω) e A declinação solar (δ), como é visto na figura 6.
Figura 6: Resultado da execução do algoritmo genético.
Fonte: Elaborado pelo autor, 2018.
Considerações Finais
O protótipo proposto mostrou-se promissor, visto que o seu uso pode acarretar uma melhora significativa no aproveitamento da energia solar obtida dos painéis solares, ao utilizar uma arquitetura de baixa custo que pode ser implementada de maneira simples e segura pelo consumidor residencial de forma a obter os benefícios na sua conta de energia. Em uma etapa futura do trabalho serão feitas medidas que poderão mensurar de maneira mais precisa o quanto o sistema pode ser mais econômico que o convencional.
Referências
ALATA, M.; AL-NIMR, M.; QAROUSH, Y. DEVELOPING A MULTIPURPOSE SUN TRACKING SYSTEM USING FUZZY CONTROL. ENERGY CONVERSION AND MANAGEMENT, V. 13, N. 46, P. 1229 - 1245, 2005. ISSN 0196-8904.
BATISTA DE ARAÚJO, JONAS DAMASCENO. PROTÓTIPO DE RASTREADOR SOLAR DE UM EIXO BASEADO EM MICROCONTROLADOR. 2015. 87 P. DISSERTAÇÃO DE MESTRADO (PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA DA UFRN) - UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE, RN, 2016. DISPONÍVEL EM: . ACESSO EM: 24 DE MAIO DE 2017.
KALOGIROU, S. A. DESIGN AND CONSTRUCTION OF A ONE-AXIS SUN-TRAKING SYSTEM. SOLAR ENERGY, V.57, N.6, P. 465 - 469, 1996. ISSN 0038-092X.
LIRA, J. R. V. IMPLEMENTAÇÃO DE UM SISTEMA DE CONTROLE DE POSIÇÃO APLICADO A UM RASTREADOR SOLAR DO TIPO POLAR. DISSERTAÇÃO (MESTRADO) - UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE, NATAL, BRASIL, 2014.
LUÍZ SOARES, GUSTAVO. ALGORITMOS GENÉTICOS: ESTUDO, NOVAS TÉCNICAS E APLICAÇÕES. 1997. 145 P. DISSERTAÇÃO DE MESTRADO (PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA) - ESCOLA DE ENGENHARIA DA UNIVERSIDADE FEDERAL DE MINAS GERAIS, BELO HORIZONTE, 1997. DISPONÍVEL EM: . ACESSO EM: 24 DE MAIO DE 2017.
OLIVEIRA, C. A. A. DESENVOLVIMENTO DE UM PROTÓTIPO DE RASTREADOR SOLAR DE BAIXO CUSTO E SEM BATERIAS. DISSERTAÇÃO (MESTRADO) - UNIVERSIDADE FEDERAL DE PERNAMBUCO, RECIFE, BRAZIL, 2007.
ROTH, P.; GEORGIEV, A.; BOUDINOV, H. DESIGN AN CONSTRUCTION OF A SYSTEM FOR SUN-TRACKING. RENEWABLE ENERGY, V. 29, N. 3, P. 393 - 402, 2004. ISSN 0960-1481.
Agência Financiadora
FAPEMAT
Emitido pelo Sistema em 14/06/2026 21:05:35. Pode ser consultado em endereço: https://eventos.ifmt.edu.br/publicacao/217/.